HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD
Posted by joerg_999
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (JTAG) and OpenOCD December 09, 2015 08:02AM |
Registered: 9 years ago Posts: 94 |
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (JTAG) and OpenOCD December 09, 2015 09:43AM |
Registered: 8 years ago Posts: 2 |
Thanks reply joerg_999.
I did 10 times. But Can't Solve this problem. Need more retry?
Can I sure perfect wiring between RP2 and Pogoplug E2?
--------------------------------------------------------------------------------------------
Open On-Chip Debugger 0.10.0-dev-00146-g332023f (2015-12-09-15:02)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
SysfsGPIO nums: tck = 11, tms = 25, tdi = 10, tdo = 9
SysfsGPIO num: srst = 24
Info : auto-selecting first available session transport "jtag". To override use 'transport select <transport>'.
trst_and_srst separate srst_gates_jtag trst_push_pull srst_open_drain connect_deassert_srst
adapter_nsrst_delay: 200
jtag_ntrst_delay: 200
adapter speed: 1000 kHz
adapter_nsrst_delay: 500
Warn : use 'feroceon.cpu' as target identifier, not '0'
pogo_load_uboot
Info : SysfsGPIO JTAG/SWD bitbang driver
Info : JTAG only mode enabled (specify swclk and swdio gpio to add SWD mode)
Info : This adapter doesn't support configurable speed
Info : JTAG tap: feroceon.cpu tap/device found: 0x20a023d3 (mfg: 0x1e9, part: 0x0a02, ver: 0x2)
Info : Embedded ICE version 0
Info : feroceon.cpu: hardware has 1 breakpoint/watchpoint unit
Info : accepting 'telnet' connection on tcp/4444
requesting target halt and executing a soft reset
feroceon.cpu: target state: halted
target halted in ARM state due to debug-request, current mode: Supervisor
cpsr: 0x000000d3 pc: 0x00000000
MMU: disabled, D-Cache: disabled, I-Cache: disabled
Error: unknown NAND flash device found, manufacturer id: 0x10 device id: 0x10
or
Error: unknown NAND flash device found, manufacturer id: 0x50 device id: 0x50
I did 10 times. But Can't Solve this problem. Need more retry?
Can I sure perfect wiring between RP2 and Pogoplug E2?
--------------------------------------------------------------------------------------------
Open On-Chip Debugger 0.10.0-dev-00146-g332023f (2015-12-09-15:02)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
SysfsGPIO nums: tck = 11, tms = 25, tdi = 10, tdo = 9
SysfsGPIO num: srst = 24
Info : auto-selecting first available session transport "jtag". To override use 'transport select <transport>'.
trst_and_srst separate srst_gates_jtag trst_push_pull srst_open_drain connect_deassert_srst
adapter_nsrst_delay: 200
jtag_ntrst_delay: 200
adapter speed: 1000 kHz
adapter_nsrst_delay: 500
Warn : use 'feroceon.cpu' as target identifier, not '0'
pogo_load_uboot
Info : SysfsGPIO JTAG/SWD bitbang driver
Info : JTAG only mode enabled (specify swclk and swdio gpio to add SWD mode)
Info : This adapter doesn't support configurable speed
Info : JTAG tap: feroceon.cpu tap/device found: 0x20a023d3 (mfg: 0x1e9, part: 0x0a02, ver: 0x2)
Info : Embedded ICE version 0
Info : feroceon.cpu: hardware has 1 breakpoint/watchpoint unit
Info : accepting 'telnet' connection on tcp/4444
requesting target halt and executing a soft reset
feroceon.cpu: target state: halted
target halted in ARM state due to debug-request, current mode: Supervisor
cpsr: 0x000000d3 pc: 0x00000000
MMU: disabled, D-Cache: disabled, I-Cache: disabled
Error: unknown NAND flash device found, manufacturer id: 0x10 device id: 0x10
or
Error: unknown NAND flash device found, manufacturer id: 0x50 device id: 0x50
|
zhfst
Re: HOW2: Repair Pogo E02 with Raspberry PI (JTAG) and OpenOCD December 17, 2015 03:23AM |
> arm mcr 15 0 0 1 0 0x00052078
feroceon.cpu: target state: halted
target halted in ARM state due to debug-request, current mode: Undefined instruction
cpsr: 0x200000db pc: 0xffff531c
MMU: disabled, D-Cache: disabled, I-Cache: disabled
> soft_reset_halt
requesting target halt and executing a soft reset
feroceon.cpu: target state: halted
target halted in ARM state due to debug-request, current mode: Supervisor
cpsr: 0x200000d3 pc: 0x00000000
MMU: disabled, D-Cache: disabled, I-Cache: disabled
> nand probe 0
NAND flash device 'NAND 128MiB 3.3V 8-bit (Hynix)' found
> pogo_load_uboot
Halt timed out, wake up GDB.
timed out while waiting for target halted
>
feroceon.cpu: target state: halted
target halted in ARM state due to debug-request, current mode: Undefined instruction
cpsr: 0x200000db pc: 0xffff531c
MMU: disabled, D-Cache: disabled, I-Cache: disabled
> soft_reset_halt
requesting target halt and executing a soft reset
feroceon.cpu: target state: halted
target halted in ARM state due to debug-request, current mode: Supervisor
cpsr: 0x200000d3 pc: 0x00000000
MMU: disabled, D-Cache: disabled, I-Cache: disabled
> nand probe 0
NAND flash device 'NAND 128MiB 3.3V 8-bit (Hynix)' found
> pogo_load_uboot
Halt timed out, wake up GDB.
timed out while waiting for target halted
>
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (JTAG) and OpenOCD December 17, 2015 04:38AM |
Registered: 9 years ago Posts: 94 |
|
Victor Lopez
Re: HOW2: Repair Pogo E02 with Raspberry PI (JTAG) and OpenOCD December 18, 2015 12:41PM |
Hello, first of all thanks for this great tutorial.
I have done everything up to the NAND PROBE part of the T2 (Telnet).
Here is what I got:
Open On-Chip Debugger
> soft_reset_halt
requesting target halt and executing a soft reset
feroceon.cpu: target state: halted
target halted in ARM state due to debug-request, current mode: Supervisor
cpsr: 0x400000d3 pc: 0x00000000
MMU: disabled, D-Cache: disabled, I-Cache: disabled
> nand probe 0
unknown NAND flash device found, manufacturer id: 0x10 device id: 0x10
Tried again from the start several times but I always get the same message.
What may be wrong???
It is my Pogoplug memory burnt?
Thanks for your support.
I have done everything up to the NAND PROBE part of the T2 (Telnet).
Here is what I got:
Open On-Chip Debugger
> soft_reset_halt
requesting target halt and executing a soft reset
feroceon.cpu: target state: halted
target halted in ARM state due to debug-request, current mode: Supervisor
cpsr: 0x400000d3 pc: 0x00000000
MMU: disabled, D-Cache: disabled, I-Cache: disabled
> nand probe 0
unknown NAND flash device found, manufacturer id: 0x10 device id: 0x10
Tried again from the start several times but I always get the same message.
What may be wrong???
It is my Pogoplug memory burnt?
Thanks for your support.
|
Victor Lopez
Re: HOW2: Repair Pogo E02 with Raspberry PI (JTAG) and OpenOCD December 28, 2015 08:49AM |
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (JTAG) and OpenOCD February 18, 2016 02:18AM |
Registered: 9 years ago Posts: 94 |
Haven´t had some Pogo, I´ll start some tests in nativ mode today......
Good news, i got it working. It was a timing and reset problem.
I will change my discription on page 1, but before i´ll do some more tests for better Performance
the main changes:
1.) switched to raspi-nativ mode for more speed (you have to compile with new nativ option enabled),
2.) set adapter_khz 2000 speed and
3.) changed Reset from Pin 18 (GPIO24) to Pin 26 (GPIO7) - that solved the basic problem
Update: with the right values i could flash a new uboot in 12sec -- superfast ! (x times faster than buspirate)
Update2: discription on page 1 is up to date now! + update uboot / uboot-env to the latest version from bodhi.
Update3: got it working on all RPIs (B,B+,RPI2 and the new RPI3)
--joerg_999
Edited 15 time(s). Last edit at 03/14/2016 01:18PM by joerg_999.
Good news, i got it working. It was a timing and reset problem.
I will change my discription on page 1, but before i´ll do some more tests for better Performance
the main changes:
1.) switched to raspi-nativ mode for more speed (you have to compile with new nativ option enabled),
2.) set adapter_khz 2000 speed and
3.) changed Reset from Pin 18 (GPIO24) to Pin 26 (GPIO7) - that solved the basic problem
Update: with the right values i could flash a new uboot in 12sec -- superfast ! (x times faster than buspirate)
Update2: discription on page 1 is up to date now! + update uboot / uboot-env to the latest version from bodhi.
Update3: got it working on all RPIs (B,B+,RPI2 and the new RPI3)
--joerg_999
Edited 15 time(s). Last edit at 03/14/2016 01:18PM by joerg_999.
|
Mark
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD April 19, 2016 01:26AM |
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD April 19, 2016 03:40AM |
Registered: 9 years ago Posts: 94 |
Mark Wrote:
-------------------------------------------------------
> Does this work on Dockstar Also?
>
> Thanks
Yes, should also work on a dockstar but you´ve to use dockstar.cfg from member z3bram3n some posts above.
You also have to use the fitting uboot files for dockstar, envs are the same.
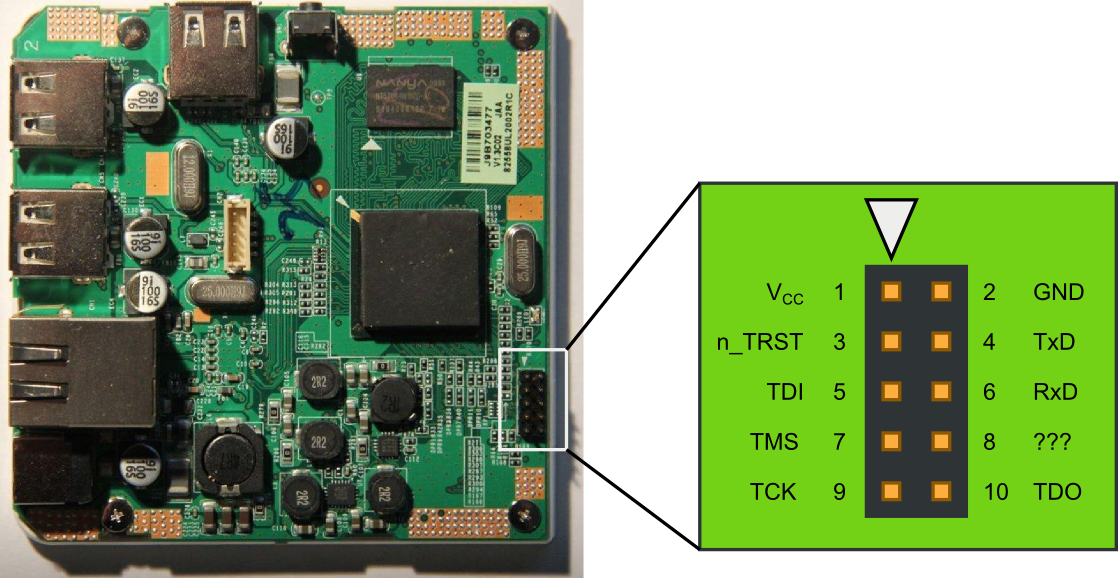
Pinout should look like:
################################################################################
## JTAG connector - Dockstar, GoflexNet, GoflexHome ##
################################################################################
Dockstar plug J1 10 pin, Serial Link / JTAG (Pin counting pairwise, and original)
function........................name pin org pin name function color RS232
Output..........................VCC...1 .1 ..10 .2 GND blk
Test Reset, active low.TRST..3 .2 ...9 ..4 TxD 3.3 V blu
Test Data Input............TDI.....5 .3 ...8 ..6 RxD 3.3 V wht
Test Mode Select.........TMS...7 .4 ...7 ..8 SRST System Reset, active low
Test Clock....................TCK....9 .5 ...6 .10 TDO Test Data Output
--------------------------------------------------------------------------------
Dockstar -- Bus Pirate/Raspi
(Wire colors from Buspirate cable)
01 - Vcc NC
02 - Aux (Blue)
03 - TDI (Grey) ....1 10
04 - TMS (White) .2 9
05 - TCK (Violett) .3 8
06 - TDO (Black) ..4 7
07 - NC .................5 6
08 - TXD of the Serial Adapter
09 - RXD of the Serial Adapter
10 - GND (Brown)
--joerg_999
Edited 2 time(s). Last edit at 04/19/2016 03:57AM by joerg_999.
-------------------------------------------------------
> Does this work on Dockstar Also?
>
> Thanks
Yes, should also work on a dockstar but you´ve to use dockstar.cfg from member z3bram3n some posts above.
You also have to use the fitting uboot files for dockstar, envs are the same.
Pinout should look like:
################################################################################
## JTAG connector - Dockstar, GoflexNet, GoflexHome ##
################################################################################
Dockstar plug J1 10 pin, Serial Link / JTAG (Pin counting pairwise, and original)
function........................name pin org pin name function color RS232
Output..........................VCC...1 .1 ..10 .2 GND blk
Test Reset, active low.TRST..3 .2 ...9 ..4 TxD 3.3 V blu
Test Data Input............TDI.....5 .3 ...8 ..6 RxD 3.3 V wht
Test Mode Select.........TMS...7 .4 ...7 ..8 SRST System Reset, active low
Test Clock....................TCK....9 .5 ...6 .10 TDO Test Data Output
--------------------------------------------------------------------------------
Dockstar -- Bus Pirate/Raspi
(Wire colors from Buspirate cable)
01 - Vcc NC
02 - Aux (Blue)
03 - TDI (Grey) ....1 10
04 - TMS (White) .2 9
05 - TCK (Violett) .3 8
06 - TDO (Black) ..4 7
07 - NC .................5 6
08 - TXD of the Serial Adapter
09 - RXD of the Serial Adapter
10 - GND (Brown)
--joerg_999
Edited 2 time(s). Last edit at 04/19/2016 03:57AM by joerg_999.
|
Repair NSA325V1 ? December 17, 2016 05:35AM |
Registered: 7 years ago Posts: 25 |
Hello,
at first: i was able to reflash an iomega iconnect with this method in the last summer.
changed settings were:
adapter_khz 200
adapter_nsrst_delay 500
-------------------------------------------
Now I`m trying to reflash a used Zyxel NSA 325V1, bought on ebay.
Serial console shows no sign of life, the system seems to reboot after around 30 s.
Watchdog ?
Kwboot is possible, Bodhi`s uboot was sent completely, then a single cryptic character returned, nothing further happened.
Exactly the same behaviour with an uBoot-file from ArchLinux too.
With both files there was no reboot after the 30s however.
nand erase 0 0x0 0xa0000
command before was done succesfully.
Question is:
How can i bring the watchdog to a hold-state ?
BR
dietgert
-------------------
Moderator: merged to the correct topic
Edited 4 time(s). Last edit at 12/17/2016 03:21PM by bodhi.
at first: i was able to reflash an iomega iconnect with this method in the last summer.
changed settings were:
adapter_khz 200
adapter_nsrst_delay 500
-------------------------------------------
Now I`m trying to reflash a used Zyxel NSA 325V1, bought on ebay.
Serial console shows no sign of life, the system seems to reboot after around 30 s.
Watchdog ?
Kwboot is possible, Bodhi`s uboot was sent completely, then a single cryptic character returned, nothing further happened.
Exactly the same behaviour with an uBoot-file from ArchLinux too.
With both files there was no reboot after the 30s however.
> pogo_init feroceon.cpu: target state: halted target halted in Thumb state due to debug-request, current mode: Supervisor cpsr: 0x200000f3 pc: 0xffff0a0e MMU: enabled, D-Cache: enabled, I-Cache: enabled > soft_reset_halt requesting target halt and executing a soft reset feroceon.cpu: target state: halted target halted in ARM state due to debug-request, current mode: Supervisor cpsr: 0x200000d3 pc: 0x00000000 MMU: disabled, D-Cache: disabled, I-Cache: disabled > nand write 0 uboot.kwb 0 oob_softecc_kw timed out while waiting for target halted error executing hosted NAND write Unable to write data to NAND device failed writing file uboot.kwb to NAND flash 0 at offset 0x00000000
nand erase 0 0x0 0xa0000
command before was done succesfully.
Question is:
How can i bring the watchdog to a hold-state ?
BR
dietgert
-------------------
Moderator: merged to the correct topic
Edited 4 time(s). Last edit at 12/17/2016 03:21PM by bodhi.
|
Re: Repair NSA325V1 ? December 17, 2016 03:33PM |
Admin Registered: 13 years ago Posts: 18,564 |
Hi dietgert,
> Serial console shows no sign of life, the system
> seems to reboot after around 30 s.
> Watchdog ?
Yes. Watchdog kicks in at 30s.
> Kwboot is possible, Bodhi`s uboot was sent
> completely, then a single cryptic character
> returned, nothing further happened.
> Exactly the same behaviour with an uBoot-file from
> ArchLinux too.
I've seen a bricked NSA325 board behaves similarly, but the watchdog still kicks in at 30s. Just no serial console input/output.
> With both files there was no reboot after the 30s
> however.
Ah. My u-boot has the watchdog killed right away, so that's why it did not run.
> > pogo_init
> feroceon.cpu: target state: halted
> target halted in Thumb state due to debug-request,
> current mode: Supervisor
> cpsr: 0x200000f3 pc: 0xffff0a0e
> MMU: enabled, D-Cache: enabled, I-Cache: enabled
> > soft_reset_halt
> requesting target halt and executing a soft reset
> feroceon.cpu: target state: halted
> target halted in ARM state due to debug-request,
> current mode: Supervisor
> cpsr: 0x200000d3 pc: 0x00000000
> MMU: disabled, D-Cache: disabled, I-Cache:
> disabled
It looks good to get here so far.
> nand erase 0 0x0 0xa0000
> command before was done succesfully.
Did you erase mtd0 successfully? I did not quite follow what you said.
> Question is:
> How can i bring the watchdog to a hold-state ?
Could you post the entire JTAG log session here? and also include the content of any cfg files that you are using. I might need to look at my saved log to see how to write a command turn off the watchdog at console prompt.
-bodhi
===========================
Forum Wiki
bodhi's corner (buy bodhi a beer)
> Serial console shows no sign of life, the system
> seems to reboot after around 30 s.
> Watchdog ?
Yes. Watchdog kicks in at 30s.
> Kwboot is possible, Bodhi`s uboot was sent
> completely, then a single cryptic character
> returned, nothing further happened.
> Exactly the same behaviour with an uBoot-file from
> ArchLinux too.
I've seen a bricked NSA325 board behaves similarly, but the watchdog still kicks in at 30s. Just no serial console input/output.
> With both files there was no reboot after the 30s
> however.
Ah. My u-boot has the watchdog killed right away, so that's why it did not run.
> > pogo_init
> feroceon.cpu: target state: halted
> target halted in Thumb state due to debug-request,
> current mode: Supervisor
> cpsr: 0x200000f3 pc: 0xffff0a0e
> MMU: enabled, D-Cache: enabled, I-Cache: enabled
> > soft_reset_halt
> requesting target halt and executing a soft reset
> feroceon.cpu: target state: halted
> target halted in ARM state due to debug-request,
> current mode: Supervisor
> cpsr: 0x200000d3 pc: 0x00000000
> MMU: disabled, D-Cache: disabled, I-Cache:
> disabled
It looks good to get here so far.
> nand erase 0 0x0 0xa0000
> command before was done succesfully.
Did you erase mtd0 successfully? I did not quite follow what you said.
> Question is:
> How can i bring the watchdog to a hold-state ?
Could you post the entire JTAG log session here? and also include the content of any cfg files that you are using. I might need to look at my saved log to see how to write a command turn off the watchdog at console prompt.
-bodhi
===========================
Forum Wiki
bodhi's corner (buy bodhi a beer)
|
J. Carlos
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD January 29, 2017 05:44PM |
I'm trying to use this howto to debrick my dockstar.
Can someone tell me the correspondence between this:
## Raspi ## Note: be careful and don´t mix GPIO and Pin number on Raspi!
## we use the Pins from SPI Interface (violett) 19,21,23,26 and 22 + 20 for GND see GPIO schematic Raspi
GPIO--------Pin#--color BP ---------- JTAG Pogo E02 (Wire colors from Buspirate cable)
GND ------- 20 - (Brown) GND ----------- GND (1)
GPIO 10 --- 19 - (Grey) MOSI ----------- TDI (2)
GPIO 9 ---- 21 - (Black) MISO ---------- TDO (4)
GPIO 11 --- 23 - (Violett) CLK --------- CLK (5)
GPIO 25 --- 22 - (White) CS ------------ TMS (6)
GPIO 7 --- 26 - (Blue) AUX/TRST ------- RES (7)
and this:
https://lunarius.fe80.eu/blog/files/openwrt/dockstar/jtag-dockstar-pinout.png
Perhaps CLK is TCK and RES is n_TRST?
Thanks
Can someone tell me the correspondence between this:
## Raspi ## Note: be careful and don´t mix GPIO and Pin number on Raspi!
## we use the Pins from SPI Interface (violett) 19,21,23,26 and 22 + 20 for GND see GPIO schematic Raspi
GPIO--------Pin#--color BP ---------- JTAG Pogo E02 (Wire colors from Buspirate cable)
GND ------- 20 - (Brown) GND ----------- GND (1)
GPIO 10 --- 19 - (Grey) MOSI ----------- TDI (2)
GPIO 9 ---- 21 - (Black) MISO ---------- TDO (4)
GPIO 11 --- 23 - (Violett) CLK --------- CLK (5)
GPIO 25 --- 22 - (White) CS ------------ TMS (6)
GPIO 7 --- 26 - (Blue) AUX/TRST ------- RES (7)
and this:
https://lunarius.fe80.eu/blog/files/openwrt/dockstar/jtag-dockstar-pinout.png
Perhaps CLK is TCK and RES is n_TRST?
Thanks
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD January 29, 2017 06:26PM |
Registered: 9 years ago Posts: 94 |
Hi J. Carlos
please see post http://forum.doozan.com/read.php?3,21789,27701#msg-27701
this is JTAG connection for Dockstar, GoflexNet and GoflexHome
-joerg_999
please see post http://forum.doozan.com/read.php?3,21789,27701#msg-27701
this is JTAG connection for Dockstar, GoflexNet and GoflexHome
-joerg_999
|
J. Carlos
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD January 30, 2017 07:04AM |
|
J. Carlos
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD January 31, 2017 12:30PM |
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD January 31, 2017 02:27PM |
Registered: 9 years ago Posts: 94 |
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD February 15, 2017 04:42AM |
Registered: 10 years ago Posts: 38 |
Hello guys I have a problem trying to write the nand file uboot.
This is the output
Can you please help me somehow? Thank you in advance. Marco
EDIT:
Thanks @dietgert I changed
and nand write succeded.
No more dead pogos!
Thank you joerg for your work. I really appreciated your efforts. Kind rgards. Marco
Edited 5 time(s). Last edit at 02/15/2017 08:26AM by ueghio.
This is the output
> pogo_init > soft_reset_halt requesting target halt and executing a soft reset target halted in ARM state due to debug-request, current mode: Supervisor cpsr: 0x200000d3 pc: 0x00000000 MMU: disabled, D-Cache: disabled, I-Cache: disabled > nand probe 0 memory write caused data abort (address: 0xd8000001, size: 0x1, count: 0x1) NAND flash device 'NAND 128MiB 3.3V 8-bit (Hynix)' found > nand erase 0 0x0 0xa0000 erased blocks 0 to 4 on NAND flash device #0 'NAND 128MiB 3.3V 8-bit' > nand write 0 uboot.kwb 0 oob_softecc_kw timed out while waiting for target halted error executing hosted NAND write Unable to write data to NAND device failed writing file uboot.kwb to NAND flash 0 at offset 0x00000000 >In a second moment I get
> nand write 0 uboot.kwb 0 oob_softecc_kw memory write caused data abort (address: 0xd8000001, size: 0x1, count: 0x1) memory write caused data abort (address: 0xd8000001, size: 0x1, count: 0x1) memory read caused data abort (address: 0xd8000000, size: 0x1, count: 0x1) timeout waiting for SYSCOMP & DBGACK, last DBG_STATUS: 0 failed writing file uboot.kwb to NAND flash 0 at offset 0x00034800Here is another error
> nand write 0 uboot.kwb 0 oob_softecc_kw invalid mode value encountered 0 invalid mode value encountered 3 cpsr contains invalid mode value - communication failure error executing hosted NAND write Unable to write OOB data to NAND device failed writing file uboot.kwb to NAND flash 0 at offset 0x00047800 target halted in ARM state due to debug-request, current mode: Supervisor cpsr: 0xe00000d3 pc: 0x00300064 MMU: disabled, D-Cache: disabled, I-Cache: disabled
Can you please help me somehow? Thank you in advance. Marco
EDIT:
Thanks @dietgert I changed
adapter_khz 200
and nand write succeded.
No more dead pogos!
Thank you joerg for your work. I really appreciated your efforts. Kind rgards. Marco
Edited 5 time(s). Last edit at 02/15/2017 08:26AM by ueghio.
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD February 22, 2017 02:38AM |
Registered: 9 years ago Posts: 94 |
Thanks for your feedback, i changed the following in raspberrypi123-native.cfg on page1:
Edited 1 time(s). Last edit at 02/22/2017 02:43AM by joerg_999.
# adapter speed in khz # my Raspi/Pogo combo accepted 2000 khz but safely it should work with adapter_khz 200 # adapter nsrst delay in ms # if you try to flash goflexnet or iomega uncomment next line to increase delay from 200ms to 500ms # adapter_nsrst_delay 500-joerg_999
Edited 1 time(s). Last edit at 02/22/2017 02:43AM by joerg_999.
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD April 12, 2017 10:30PM |
Registered: 7 years ago Posts: 67 |
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD April 13, 2017 12:55AM |
Registered: 9 years ago Posts: 94 |
youxiaojie Wrote:
-------------------------------------------------------
> dear joerg, the image of connexion to pogo is miss
> ing. can you attached again here?
of course, dropbox have changed something with my public folder, i will resend the pictures links.
-joerg_999
-should work again ;-)
Edited 2 time(s). Last edit at 04/13/2017 01:50AM by joerg_999.
-------------------------------------------------------
> dear joerg, the image of connexion to pogo is miss
> ing. can you attached again here?
of course, dropbox have changed something with my public folder, i will resend the pictures links.
-joerg_999
-should work again ;-)
Edited 2 time(s). Last edit at 04/13/2017 01:50AM by joerg_999.
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD September 07, 2017 04:57PM |
Registered: 10 years ago Posts: 10 |
Hi.
I have created a new topic, because my problem is not specifically due to Raspberry, but I'm trying to recover a bricked dockstar and it doesn't works as expected, neither with a Raspberry, neither with a Bus Pirate cards.
http://forum.doozan.com/read.php?3,36410
Thanks for help.
I have created a new topic, because my problem is not specifically due to Raspberry, but I'm trying to recover a bricked dockstar and it doesn't works as expected, neither with a Raspberry, neither with a Bus Pirate cards.
http://forum.doozan.com/read.php?3,36410
Thanks for help.
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD September 13, 2017 02:02AM |
Registered: 10 years ago Posts: 10 |
I got it to work.
Whether with Bus Pirate or with Raspberry Pi.
https://forum.doozan.com/read.php?3,36410,36536#msg-36536
Whether with Bus Pirate or with Raspberry Pi.
https://forum.doozan.com/read.php?3,36410,36536#msg-36536
|
John Mulroy
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD February 12, 2018 05:34PM |
Thanks so much for the tutorials...
Perhaps I have a POGO E02 beyond repair...
I've run your software with the Pi 3 Version B, hooked up the JTAG connections etc. and this is my output... any clues on how to proceed beyond the Telnet session error listed below (failed to halt)? I've tried the 200 Khz speed, and the Pogo reset button to no avail. Thanks again!
FROM PI:
pi@raspberrypi: ~$ sudo openocd -f pogo.cfg
Open On-Chip Debugger 0.10.0+dev-00294-g78a4b660 (2018-02-12-15:30)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
BCM2835 GPIO config: tck = 11, tms = 25, tdi = 10, tdo = 9
BCM2835 GPIO nums: swclk = 25, swdio = 24
BCM2835 GPIO config: trst = 7
trst_only separate trst_push_pull
adapter speed: 2000 kHz
Info : auto-selecting first available session transport "jtag". To override use 'transport select <transport>'.
trst_and_srst separate srst_gates_jtag trst_push_pull srst_open_drain connect_deassert_srst
adapter_nsrst_delay: 200
jtag_ntrst_delay: 200
Warn : use 'feroceon.cpu' as target identifier, not '0'
pogo_load_uboot
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : BCM2835 GPIO JTAG/SWD bitbang driver
Info : JTAG and SWD modes enabled
Info : clock speed 2009 kHz
Info : JTAG tap: feroceon.cpu tap/device found: 0x20a023d3 (mfg: 0x1e9 (Marvell Semiconductors), part: 0x0a02, ver: 0x2)
Info : Embedded ICE version 0
Info : feroceon.cpu: hardware has 1 breakpoint/watchpoint unit
Info : Listening on port 3333 for gdb connections
FROM THE TELNET 4444 Terminal:
Open On-Chip Debugger
> pogo_init
Halt timed out, wake up GDB.
timed out while waiting for target halted
>
Perhaps I have a POGO E02 beyond repair...
I've run your software with the Pi 3 Version B, hooked up the JTAG connections etc. and this is my output... any clues on how to proceed beyond the Telnet session error listed below (failed to halt)? I've tried the 200 Khz speed, and the Pogo reset button to no avail. Thanks again!
FROM PI:
pi@raspberrypi: ~$ sudo openocd -f pogo.cfg
Open On-Chip Debugger 0.10.0+dev-00294-g78a4b660 (2018-02-12-15:30)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
BCM2835 GPIO config: tck = 11, tms = 25, tdi = 10, tdo = 9
BCM2835 GPIO nums: swclk = 25, swdio = 24
BCM2835 GPIO config: trst = 7
trst_only separate trst_push_pull
adapter speed: 2000 kHz
Info : auto-selecting first available session transport "jtag". To override use 'transport select <transport>'.
trst_and_srst separate srst_gates_jtag trst_push_pull srst_open_drain connect_deassert_srst
adapter_nsrst_delay: 200
jtag_ntrst_delay: 200
Warn : use 'feroceon.cpu' as target identifier, not '0'
pogo_load_uboot
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : BCM2835 GPIO JTAG/SWD bitbang driver
Info : JTAG and SWD modes enabled
Info : clock speed 2009 kHz
Info : JTAG tap: feroceon.cpu tap/device found: 0x20a023d3 (mfg: 0x1e9 (Marvell Semiconductors), part: 0x0a02, ver: 0x2)
Info : Embedded ICE version 0
Info : feroceon.cpu: hardware has 1 breakpoint/watchpoint unit
Info : Listening on port 3333 for gdb connections
FROM THE TELNET 4444 Terminal:
Open On-Chip Debugger
> pogo_init
Halt timed out, wake up GDB.
timed out while waiting for target halted
>
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD February 20, 2018 02:11AM |
Registered: 9 years ago Posts: 94 |
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD March 11, 2018 12:09PM |
Registered: 7 years ago Posts: 25 |
Hello,
after a long time i have a little bit time again for the nsa325v1.
It is not possible to write into the flash, all other commands and their outputs are ok.
Loading the uboot into the ram however seems to be ok.
>> # if you want load uboot into ram and execute from there
>> pogo_load_uboot
But how can I execute/start it from the ram then ?
BR
dietgert
Edited 1 time(s). Last edit at 03/14/2018 03:29PM by dietgert.
after a long time i have a little bit time again for the nsa325v1.
It is not possible to write into the flash, all other commands and their outputs are ok.
Loading the uboot into the ram however seems to be ok.
>> # if you want load uboot into ram and execute from there
>> pogo_load_uboot
But how can I execute/start it from the ram then ?
BR
dietgert
Edited 1 time(s). Last edit at 03/14/2018 03:29PM by dietgert.
|
Martin from Dortmund
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD October 14, 2018 11:29AM |
I have started working on my bricked dockstar with an "Altera Usb Blaster" Clone (ca 6 € from Amazon) with minimal success.
After getting connected to the target via JTAG (USB Blaster with openocd 0.10 on Linux Mint PC), and successfully setting Processor to halted in ARM-State.
"nand probe 0" returns "unknown manufacturer 0x00 0x00".
So I made a try with Raspberry Pi B+ and made a wiring according to this plan
Up to now I got no success to connect to the dockstar, got following from openocd....
After getting connected to the target via JTAG (USB Blaster with openocd 0.10 on Linux Mint PC), and successfully setting Processor to halted in ARM-State.
"nand probe 0" returns "unknown manufacturer 0x00 0x00".
So I made a try with Raspberry Pi B+ and made a wiring according to this plan
## Raspi ## Note: be careful and don´t mix GPIO and Pin number on Raspi! ## we use the Pins from SPI Interface (violett) 19,21,23,26 and 22 + 20 for GND see GPIO schematic Raspi GPIO--------Pin#--color ------------ JTAG Dockstar GND ------- 20 - (Green) GND ----------- GND (2) GPIO 10 --- 19 - (Grey) MOSI ----------- TDI (5) GPIO 9 ---- 21 - (Black) MISO ---------- TDO (10) GPIO 11 --- 23 - (Violett) CLK --------- CLK (9) GPIO 25 --- 22 - (White) CS ------------ TMS (7) GPIO 7 --- 26 - (Blue) AUX/TRST ------- RES (3) -------------------------------------------------------------------------------- ## JTAG cable you have to build ## Create a JTAG cable with the following pinout: Pin Name Raspi(PinHeader) Dockstar TRST ---------- 26 ------------------- 3 GND ----------- 20 ------------------- 2 JTAG_TMS ------ 22 ------------------- 7 JTAG_TDI ------ 19 ------------------- 5 JTAG_TDO ------ 21 ------------------- 10 JTAG_TCK ------ 23 ------------------- 9
Up to now I got no success to connect to the dockstar, got following from openocd....
pi@raspberrypi:~/shares/daten/martin/Dockstar $ sudo openocd -f dockstar.cfgOpen On-Chip Debugger 0.10.0+dev-00548-g06589d2d (2018-10-14-13:24) Licensed under GNU GPL v2 For bug reports, read http://openocd.org/doc/doxygen/bugs.html BCM2835 GPIO config: tck = 11, tms = 25, tdi = 10, tdo = 9 BCM2835 GPIO nums: swclk = 25, swdio = 24 BCM2835 GPIO config: trst = 7 trst_only separate trst_push_pull adapter speed: 200 kHz Info : auto-selecting first available session transport "jtag". To override use 'transport select <transport>'. trst_and_srst separate srst_gates_jtag trst_push_pull srst_open_drain connect_deassert_srst adapter_nsrst_delay: 200 jtag_ntrst_delay: 200 dcc downloads are enabled fast memory access is enabled Warn : use 'feroceon.cpu' as target identifier, not '0' dockstar_reset_cpu Info : Listening on port 6666 for tcl connections Info : Listening on port 4444 for telnet connections Info : BCM2835 GPIO JTAG/SWD bitbang driver Info : JTAG and SWD modes enabled Info : clock speed 200 kHz Error: JTAG scan chain interrogation failed: all zeroes Error: Check JTAG interface, timings, target power, etc. Error: Trying to use configured scan chain anyway... Error: feroceon.cpu: IR capture error; saw 0x00 not 0x01 Warn : Bypassing JTAG setup events due to errors Info : Embedded ICE version 0 Info : feroceon.cpu: hardware has 1 breakpoint/watchpoint unit Error: unexpected Feroceon EICE version signature Info : Listening on port 3333 for gdb connections
|
Martin from Dortmund
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD October 14, 2018 11:48AM |
Revived JTAG connection to dockstar using Altera USB BLASTER on my old Linux PC
Thats the output of start sequence there ...
And then ... from telnet session
Thats the output of start sequence there ...
martin@martin-D2836-S1 /usr/share/openocd/scripts/board $ sudo openocd -f dockstar.cfg Open On-Chip Debugger 0.10.0+dev-00548-g06589d2 (2018-10-11-22:36) Licensed under GNU GPL v2 For bug reports, read http://openocd.org/doc/doxygen/bugs.html Warn : Adapter driver 'usb_blaster' did not declare which transports it allows; assuming legacy JTAG-only Info : only one transport option; autoselect 'jtag' trst_and_srst separate srst_gates_jtag trst_push_pull srst_open_drain connect_deassert_srst trst_and_srst separate srst_gates_jtag trst_push_pull srst_open_drain connect_deassert_srst adapter_nsrst_delay: 200 jtag_ntrst_delay: 200 dcc downloads are enabled fast memory access is enabled Warn : use 'feroceon.cpu' as target identifier, not '0' dockstar_reset_cpu Info : Listening on port 6666 for tcl connections Info : Listening on port 4444 for telnet connections Info : No lowlevel driver configured, using ftdi Info : usb blaster interface using libftdi Error: unable to get latency timer Info : This adapter doesn't support configurable speed Info : JTAG tap: feroceon.cpu tap/device found: 0x20a023d3 (mfg: 0x1e9 (Marvell Semiconductors), part: 0x0a02, ver: 0x2) Info : Embedded ICE version 0 Info : feroceon.cpu: hardware has 1 breakpoint/watchpoint unit Info : Listening on port 3333 for gdb connections
And then ... from telnet session
martin@martin-D2836-S1 ~ $ telnet localhost 4444 Trying 127.0.0.1... Connected to localhost. Escape character is '^]'. Open On-Chip Debugger > halt target halted in Thumb state due to debug-request, current mode: Supervisor cpsr: 0x400000f3 pc: 0xffff0a42 MMU: enabled, D-Cache: enabled, I-Cache: enabled > halt target halted in ARM state due to debug-request, current mode: Supervisor cpsr: 0x000000d3 pc: 0xffff0000 MMU: disabled, D-Cache: disabled, I-Cache: disabled > sheevaplug_init feroceon.cpu mww address data [count] mww ['phys'] address value [count] > nand probe 0 unknown NAND flash device found, manufacturer id: 0x00 device id: 0x00
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD October 14, 2018 12:34PM |
Registered: 5 years ago Posts: 23 |
Meanwhile I have registered (slightly changed my nickname)
Silly bug in editing "raspberrypi123-native.cfg", missed some lines to change, since my Pi B+ needs Pi1 settings ...
Now the much better output of openocd
Perhaps the NAND flash is really broken - there was a power break during uboot flashing procedure via serial console ...
But my wiring from above seems to be trustworthy
EDIT: Took a "synthesis" of two configurations (look after routine dockstar_init in thread) and it works!
Edited 1 time(s). Last edit at 10/14/2018 12:53PM by Martin aus Dortmund.
Silly bug in editing "raspberrypi123-native.cfg", missed some lines to change, since my Pi B+ needs Pi1 settings ...
Now the much better output of openocd
pi@raspberrypi:~/shares/daten/Martin/Dockstar $ sudo openocd -f dockstar.cfgOpen On-Chip Debugger 0.10.0+dev-00548-g06589d2d (2018-10-14-13:24) Licensed under GNU GPL v2 For bug reports, read http://openocd.org/doc/doxygen/bugs.html BCM2835 GPIO config: tck = 11, tms = 25, tdi = 10, tdo = 9 BCM2835 GPIO nums: swclk = 25, swdio = 24 BCM2835 GPIO config: trst = 7 trst_only separate trst_push_pull adapter speed: 200 kHz Info : auto-selecting first available session transport "jtag". To override use 'transport select <transport>'. trst_and_srst separate srst_gates_jtag trst_push_pull srst_open_drain connect_deassert_srst adapter_nsrst_delay: 200 jtag_ntrst_delay: 200 dcc downloads are enabled fast memory access is enabled Warn : use 'feroceon.cpu' as target identifier, not '0' dockstar_reset_cpu Info : Listening on port 6666 for tcl connections Info : Listening on port 4444 for telnet connections Info : BCM2835 GPIO JTAG/SWD bitbang driver Info : JTAG and SWD modes enabled Info : clock speed 200 kHz Info : JTAG tap: feroceon.cpu tap/device found: 0x20a023d3 (mfg: 0x1e9 (Marvell Semiconductors), part: 0x0a02, ver: 0x2) Info : Embedded ICE version 0 Info : feroceon.cpu: hardware has 1 breakpoint/watchpoint unit Info : Listening on port 3333 for gdb connections Info : accepting 'telnet' connection on tcp/4444 target halted in ARM state due to debug-request, current mode: Supervisor cpsr: 0x000000d3 pc: 0xffff0000 MMU: disabled, D-Cache: disabled, I-Cache: disabled invalid command name "dockstar_init" feroceon.cpu mww address data [count] mww ['phys'] address value [count] Error: unknown NAND flash device found, manufacturer id: 0x00 device id: 0x00
Perhaps the NAND flash is really broken - there was a power break during uboot flashing procedure via serial console ...
But my wiring from above seems to be trustworthy
EDIT: Took a "synthesis" of two configurations (look after routine dockstar_init in thread) and it works!
"NAND flash device 'NAND 256MiB 3.3V 8-bit (Micron)' found"
Edited 1 time(s). Last edit at 10/14/2018 12:53PM by Martin aus Dortmund.
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD October 14, 2018 03:31PM |
Registered: 5 years ago Posts: 23 |
Next Step
Loaded Uboot from http://ftp.debian.org/debian/dists/stretch/main/installer-armel/current/images/kirkwood/u-boot/dockstar/u-boot.kwb
Taken environment from Dropbox (Bodhi-Link) and edited it with a text editor (oops)
Serial console result:
It seems that it is not a good idea to fiddle in image files, since they are obviously crc-checked ...
Is there any tool out there to update the crc of the changed environment image?
EDIT Even with the original environment-image "uboot.2016.05-tld-1.environment" from dropbox the "bad CRC" message appars
Edited 2 time(s). Last edit at 10/14/2018 04:00PM by Martin aus Dortmund.
Loaded Uboot from http://ftp.debian.org/debian/dists/stretch/main/installer-armel/current/images/kirkwood/u-boot/dockstar/u-boot.kwb
Taken environment from Dropbox (Bodhi-Link) and edited it with a text editor (oops)
Serial console result:
U-Boot 2016.11+dfsg1-4 (Mar 27 2017 - 18:39:51 +0000)
Seagate FreeAgent DockStar
SoC: Kirkwood 88F6281_A0
DRAM: 128 MiB
WARNING: Caches not enabled
NAND: 256 MiB
*** Warning - bad CRC, using default environment
It seems that it is not a good idea to fiddle in image files, since they are obviously crc-checked ...
Is there any tool out there to update the crc of the changed environment image?
EDIT Even with the original environment-image "uboot.2016.05-tld-1.environment" from dropbox the "bad CRC" message appars
Edited 2 time(s). Last edit at 10/14/2018 04:00PM by Martin aus Dortmund.
|
Re: HOW2: Repair Pogo E02 with Raspberry PI (1,2 or 3) JTAG and OpenOCD October 14, 2018 04:29PM |
Admin Registered: 13 years ago Posts: 18,564 |
Martin aus Dortmund,
Good works :)
> It seems that it is not a good idea to fiddle in
> image files, since they are obviously crc-checked
> ...
>
> Is there any tool out there to update the crc of
> the changed environment image?
Use u-boot image form my release thread:
https://forum.doozan.com/read.php?3,12381
and
-bodhi
===========================
Forum Wiki
bodhi's corner (buy bodhi a beer)
Good works :)
> It seems that it is not a good idea to fiddle in
> image files, since they are obviously crc-checked
> ...
>
> Is there any tool out there to update the crc of
> the changed environment image?
Use u-boot image form my release thread:
https://forum.doozan.com/read.php?3,12381
uboot.2017.07-tld-1.dockstar.bodhi.tar md5 6a375a0bb5e8941d2fa416edc687f493 sha256 3b926930d0dc9d5c8b0405f1210d72b780170f1f88da29105b7c9d6a13a1cded
and
uboot.2016.05-tld-1.environment.img (the default envs image to be flashed)
-bodhi
===========================
Forum Wiki
bodhi's corner (buy bodhi a beer)


{kind=link}